
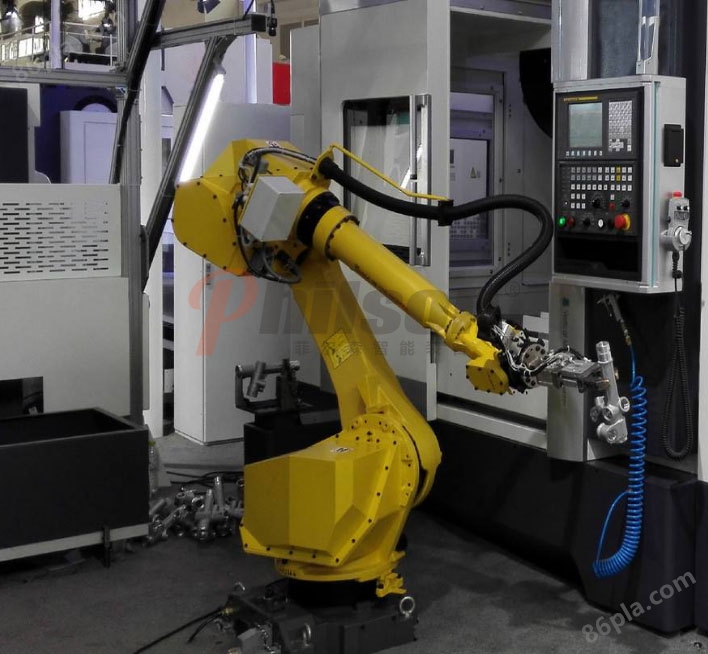

工業多關節機械手是一種適用于靠近機體操作的傳動形式。 它像人手一樣有肘關節,可實現多個自由度,動作比較靈活,適于在狹窄空間工作。早在20世紀40年代,關節式機械手就在原子能工業中得到應用,隨后又應用于開發海洋,有一定的發展前途。目前在工業生產中的應用越來越廣泛。
工業多關節機械要由執行機構、驅動機構和控制系統三大部分組成。手部是用來抓持工件(或工具)的部件,根據被抓持物件的形狀。尺寸、重量、材料和作業要求而有多種結構形式,如夾持型、托持型和吸附型等。運動機構,使手部完成各種轉動(擺動)、移動或復合運動來實現規定的動作,改變被抓持物件的位置和姿勢。運動機構的升降、伸縮、旋轉等獨立運動方式,稱為機械手的自由度。為了抓取空間中任意位置和方位的物體,需有6個自由度。自由度是機械手設計的關鍵參數。自由度越多,機械手的靈活性越大,通用性越廣, 其結構也越復雜。-般專用機械手有2 ~3個自由度。控制系統是通過對機械手每個自由度的電機的控制,來完成特定動作。同時接收傳感器反饋的信息,形成穩定的閉環控制。控制系統的核心通常是由單片機或dsp等微控制芯片構成,通過對其編程實現所要功能。
工業多關節機械手有大臂與小臂擺動,以及肘關節和肩關節的運動。具有上肢結構,可實現近似人手操作的機能,需要研制Z合適的結構。關節式機械手的傳動機構采用齒輪式、齒條式和擺動式。其傳動機構采用哪種形式,主要根據工件的輕重來決定。若按擺動式扭矩來設計,則油缸將加大,而裝載油缸的機架也將隨之加大。特別是靠近關節式前端關節部分的重量對肩部影響很大。傳動機構在承受負荷的同時必須承受自重,因此。傳動效率低。如需要大的轉動角,則宜采用擺動油缸。

















